Motor Anomaly Detection for Unmanned Aerial Vehicles Using Reinforcement Learning
Summary
(写完笔记之后最后填,概述文章的内容,以后查阅笔记的时候先看这一段。注:写文章summary切记需要通过自己的思考,用自己的语言描述。忌讳直接Ctrl + c原文)
Background
(研究的背景,帮助你理解研究的动机和必要性,包括行业现状和之前研究的局限性)
- 无人机广泛用于气象观测、农用化学品喷洒、基础设施检查和灾区监测。但是在极端环境中使用无人机引发一系列问题。(Introduction-Sub1)
- 目前为止,还没有设计出检测无人机发动机(电机)运行异常的系统。在本文中,我们开发了一种检测和保护系统,当检测到发动机温度异常时,该系统可使无人机着陆。(Introduction-Sub1)
- 电机设计寿命的一个关键因素是轴承的寿命。这可以通过两种方式进行监测。第一种方法是检测油脂因受热而变质的情况。第二种方法是通过考虑滚动疲劳来估算机械寿命。在大多数情况下,润滑脂的劣化比机械故障的影响更大。温度是影响轴承润滑脂使用寿命的关键因素。因此,我们对电机的温度进行监控,以此来检测异常情况。这意味着电机故障通常与温度异常有关。(Introduction-Sub2)
常见的电机异常检测方法:
- 异常声音检测:。从测量目标处收集声音、降噪、建模。这个过程是一个监督训练。在大多数情况下,很难在极端环境中训练数据集。因此,在嘈杂背景下使用基于声音的检测系统时,会出现错误检测。(Related Work-SubA)
- 红外成像检测:收集电机的红外图像,并在温度等于或超过预定阈值时触发警报。很难在无人机上安装具有足够精确红外成像的紧凑型热像仪,以确定温度的变化。(Related Work-SubB)
- 异常旋转检测:使用传感器监测风扇的旋转速度,并在检测到异常旋转时触发警报。然而,很难确定转速降低是由于异常还是无人机的气流速度发生了变化。风扇传感器也会影响无人机的飞行特性。
Problem Statement
- 现有的无人机很容易坠毁,常见的无人机事故是于电池容量不足、电机故障或直流电(DC)问题以及通信中断等问题导致的失控下降。(Introduction-Sub2)
Method(s)
基于强化学习的温度阈值更新
算法根据速度变化调整温度上升率,得出抑制温度上升的最佳速度变化率。
定义了三个符号
t: 电机实时温度测量值
line_T_{n+1}:历史温度均值
sigma_{n+1}: 温度波动标准差

Evaluation
在这次模拟实验中,我们构建了一个系统,当电机温度超过一定值时,无人机就会着陆。
减速率计算
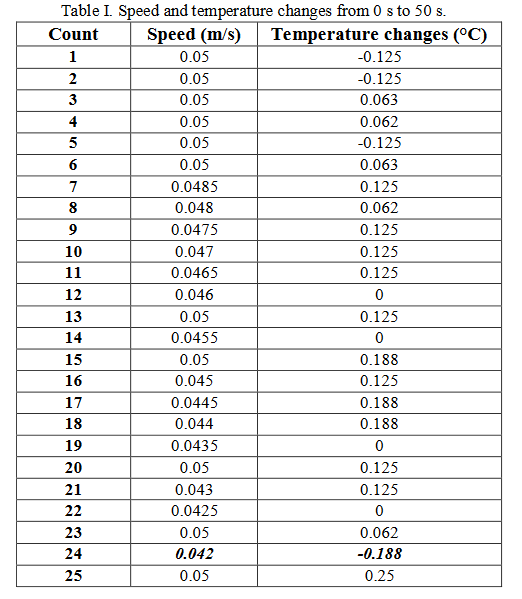
0-50秒,速度和温度的变化
1个count是2s。
Conclusion
(作者给出了哪些结论?哪些是strong conclusions, 哪些又是weak的conclusions。即作者并没有通过实验提供evidence,只在discussion中提到;或实验的数据并没有给出充分的evidence?)
Notes(optional)
(不在以上列表中,但需要特别记录的笔记。)
这篇论文的实验部分比较薄弱:
- 没有和别的的方法进行比较
- 仅仅使用温度来对电机进行异常检测,指标单一
References(optional)
(列出相关性高的文献,以便之后可以继续track下去。)


