参考资料
https://www.cnblogs.com/noluye/p/11964513.html
背景
复数是对实数的扩充,能解决普通实数不能很好解决的问题。
例如:
实数无法解决这个问题,数学家提出一个很厉害的思想,承认
可以不必纠结
复数定义
复数由两个部分组成:实部(real part)和虚部(imaginary part)。实部就是我们平常遇到的数(正数、负数、0),而虚部是一个实数和
不过在 Python 中,复数的
1 z = 3 + 4j
2 z, z.real, z.imag # 复数、实部、虚部复数与旋转
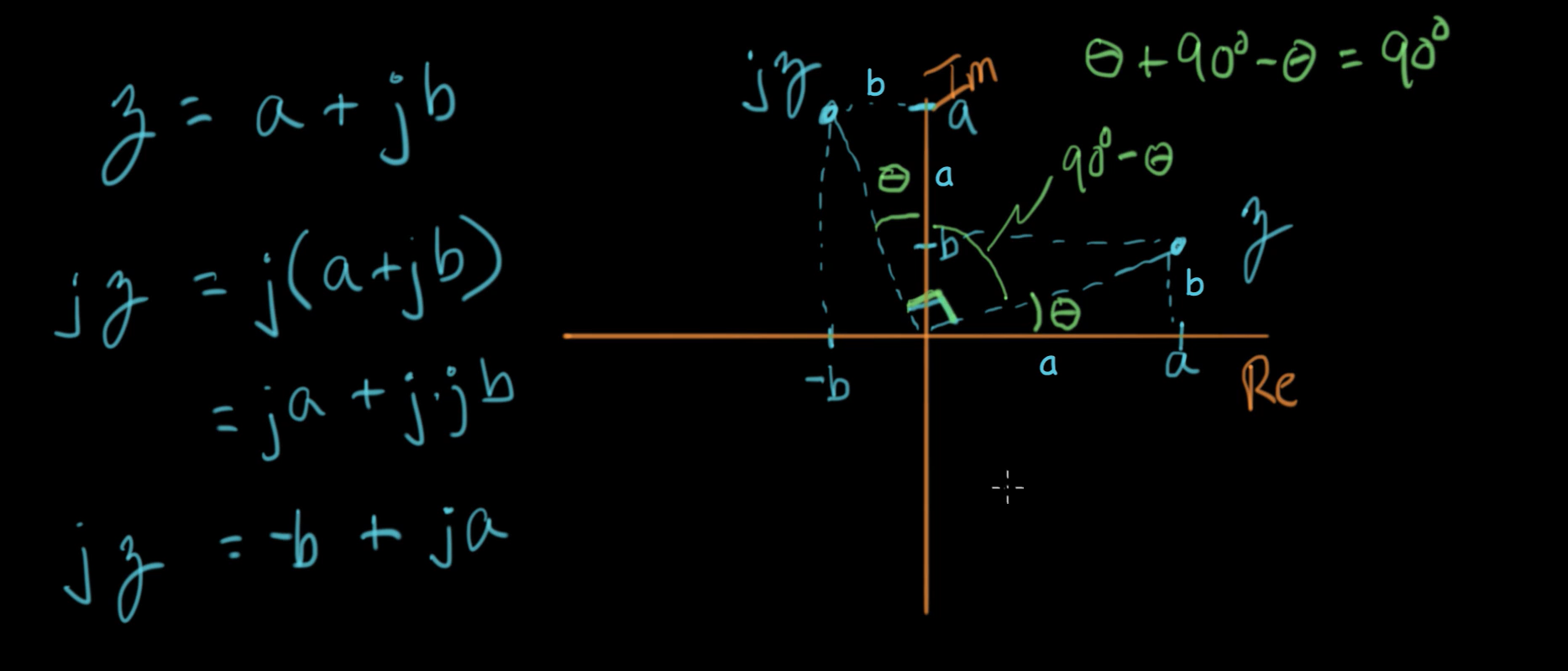
如上图所示,假设一个复数是
这两个向量之间的夹角刚好是90°。
要对一个复数(这个复数在复平面可以表示为一个 2D 向量)旋转 90°,只需乘以
极坐标表示
旋转 90°,只需乘以
以及,为什么乘以复数会表示旋转?
为了解决这两个问题,我们开始引入复平面上的极坐标表示。
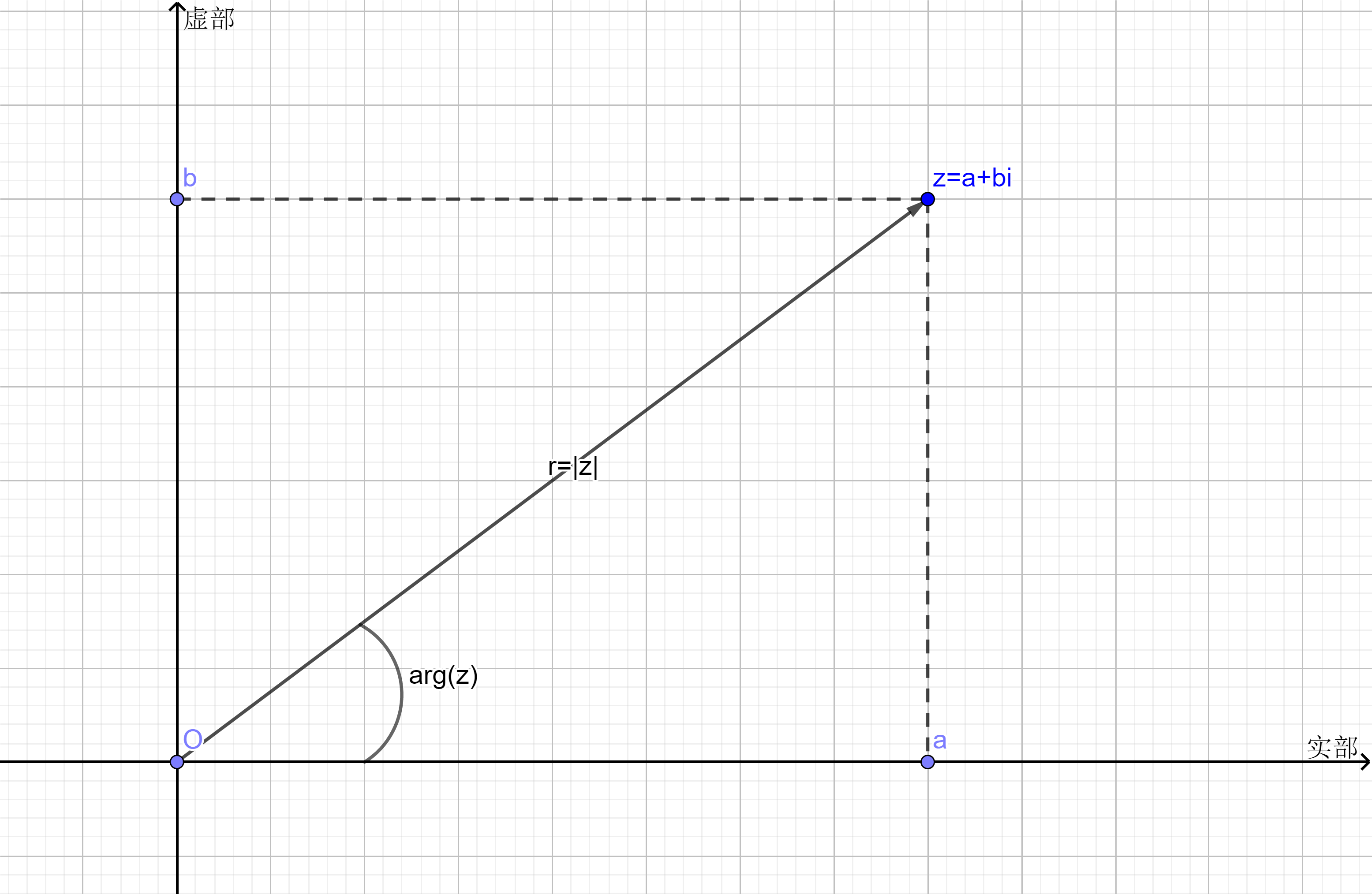
复数
长度
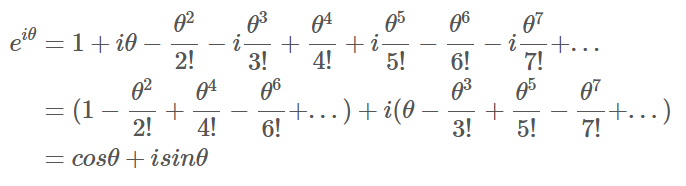
根据欧拉公式
欧拉公式的证明在后面
定两个任意用极坐标表示的复数:
两个复数的乘积得到另一个复数。
它的模等于两个复数的模的乘积:
它的幅角等于两个复数的幅角的和:
于是看起来,考虑复平面这个几何情形,乘以一个复数,可以同时带来两种变换的效果:
长度的缩放(通过改变模长)。
旋转(通过改变幅角)。
旋转子
接下来一个很自然的想法,就是:乘以一个什么样的复数,不会产生缩放,只会产生旋转?
显然,通过前面极坐标下自然底数的表达形式的推导,我们知道乘以一个模为 1 的复数时,不会导致缩放,只会产生旋转。
这样的复数就称为旋转子(rotor),旋转子提供了“纯”旋转动作的数学表示,它可以将复数旋转任意角度。一般而言,将复数旋转角度
如果要对一个复数逆时针 旋转45°,需要乘以:
如果是顺时针旋转呢?那就乘以其共轭复数。
欧拉公式的证明
其中一种证明方法是利用泰勒级数把
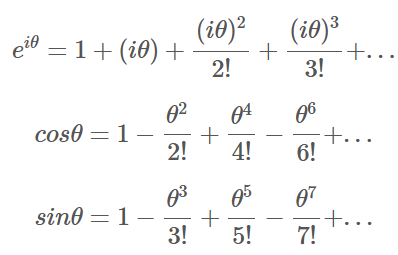
根据