基础知识
三角函数
旋转矩阵
https://zhuanlan.zhihu.com/p/183973440
XY坐标系中,向量OP旋转β角度到了OP’的位置:
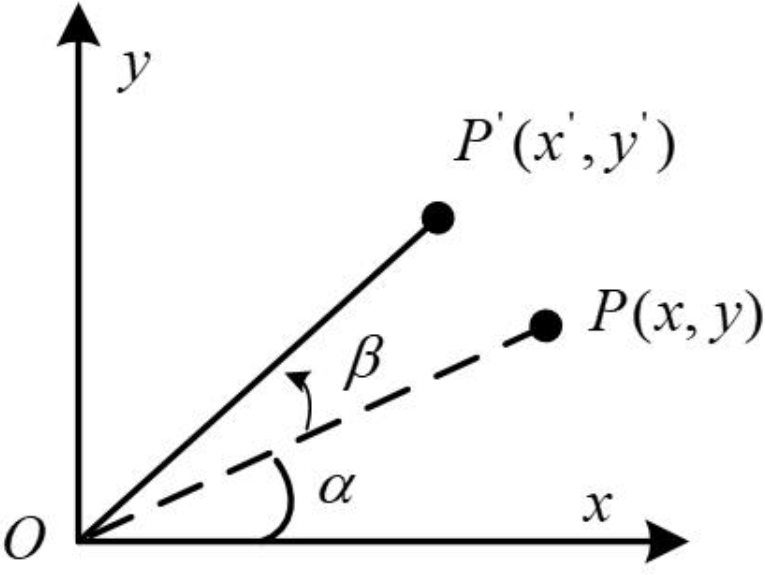
根据三角函数关系,可以列出向量OP与OP’的坐标表示形式:
对比上面个两个式子,将第2个式子展开:

用矩阵形式重新表示为: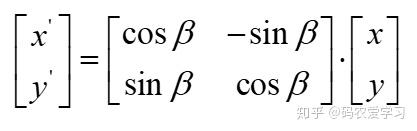
中间的矩阵即二维旋转的旋转矩阵,坐标中的某一向量左乘该矩阵后,即得到这个向量旋转β角后的坐标。
论文核心逻辑
- 背景:Transformer 的自注意力机制(Self-Attention)计算的是 Query 和 Key 的内积。我们需要把位置信息
和 塞进 和 里。 - 目标:我们希望找到一种编码方式
,使得 Query 和 Key 做内积(Attention Score)之后,结果只包含相对位置 的信息。即: 应该等价于一个函数 。这个函数 就是约束,经过位置编码后的 和 的内积,应该等于一个只与“相对距离 ( )”有关的函数 : - 推导:
- 先在 2维空间(复数域)推导,发现 旋转(Rotation) 完美满足上述条件。
- 再推广到
维空间,通过将向量切分为 个子空间,分别旋转。
- 性质 (Properties, Sec 3.3): 这种旋转编码自带“远程衰减”特性,符合语言规律。
一些问题
问题1
论文公式(4)中的
问题2
公式2下面的公式,咋一看有些不对,但是仔细看,可以这样去理解。
公式解读
公式1
ROPE需要拿着
公式18a
论文写的是
应该是写错了,按照上面的公式,推导下来应该是:
按照论文的推导,可以得到:
比较难理解的在于
可以这样理解:
公式14,论文原文解释说,可以理解为“带有空位置信息的向量” (vectors with empty position information encoded) 。也就是说,
再看公式17,是在初始条件下(m=0)的情况下得到的。
前一个都好推导,因为这里是假设二维平面,
- 中间项
:这是复数 的标准写法。 表示向量 的模长(也就是长度)。 表示向量 的原本角度。
后一部分,需要和公式15结合,把m=0代入就好。
- 右边项
:这是位置编码函数 在 时的写法。 是函数定义的模长部分。 是函数定义的角度部分。
要想让公式成立,那么模长和模长要相等,辐角和辐角也相等。所以:
在这个基础上,回到公式18a就能得到:
那么也就推出了,在m=n的条件下:
公式16第二行
这个公式是公式15和公式16的结合,理论上应该是下面这个才对:
而公式16第二行给出的是:
关键在于为什么是减号而不是加号?
原因在于
维度和向量
向量的解释有很多种,空间中的箭头、有序的列表等都是正确的:
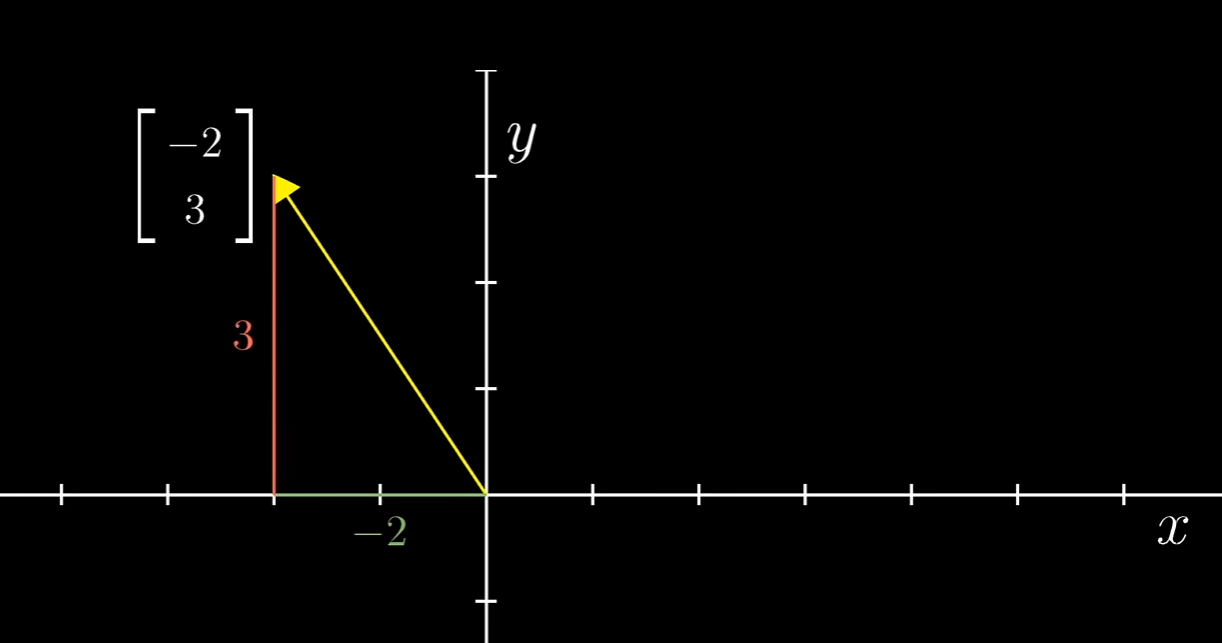
如果在平面当中,这就是一个二维向量。对于每个token来说,它是一个
在ROPE的论文里面,为了方便推导,先从d=2,也就是二维向量开始推导。然后推广到多维。
前提知识
公式4:这个公式以二维复平面为例进行示例并推导公式。我们先说二维平面,在二维空间中,设两个实数向量为
现在来到复平面,把这两个向量看作复数
这时候,如果我们计算复数内积(
实部就是我们需要的点积结果
而公式4之所以写成了极坐标形式而不是复数形式,是为了后面更好的推导。因为论文是通过“旋转”来施加位置编码,说的更细一点,就是转动一定的角度来赋予位置编码。而极坐标是由模长和角度两部分组成,使用极坐标,能直观的看到角度的变化。
3.4小节解读
首先3.4小节明确了是二维的情况。按照公式1的说法:
那么
所以在3.4小节中,
因为作者借助复数来推导,所以后面的内积是复数域的内积。
对于二维向量来说,内积就是对应部分乘积然后相加。
内积的符号:<>
a=[3,2]
b=[4,6]
推广到复数域:a=3+2i; b=4+6i
如果直接计算内积:
因为内积是标量,所以会对计算结果取实部,但是结果显然不对,应该乘以后面那个复数的共轭。
公式12:
公式13:没啥好说的,query和key做内积
公式14:论文原文解释说,可以理解为“带有空位置信息的向量” (vectors with empty position information encoded) 。也就是说,
公式15:把公式12和公式13从二维平面推广到复数平面,使用极坐标的方式表示,前面的是模长,后面的幅角。
公式16:因为公式13,f_q和f_k做内积,会得到g的函数。现在要把极坐标的形式进行代入。因为极坐标的乘法是模长和模长相乘,幅角和幅角相乘。所以公式16的第一个式子没有问题。第二个式子因为是极坐标形式,做内积的时候,后面那一项需要取共轭,所以
公式17:和公式14差不多,是一个初始条件。假定位置是0,也就是旋转角度为0。
公式17应该和公式14放在一起,或者说公式17是公式14的进一步展开。q,k在二维平面上用极坐标表示,原始的角度是
k也是同样的,这个推论在公式18会用到。这个推论,其实和公式19一样。不过不重要,只要能推导出来就行。
公式18:论文写的不清楚,而且可能有些笔误,按照我的方式来理解:
论文是要证明这个结论:
根据公式16可以得到:
再根据公式16,如果m和n都取0,也可以得到
所以:
再根据公式17的推论。
就可以得到:
公式19:跳过,推论可以由公式17得到
过度公式:
这个是由公式18b移动项得到的,这样看这个公式会好理解些:
这个公式得出一个结论,那就是Query 的角度增量和Key 的角度增量相同。这里关键是要理解这个差值相同,可以想象一个图辅助理解,假设q的初始角度是10,k的初始角度是20。那么q转动到35,k转动到45,两边的增量都是25。核心的点在于转了多少,而不是最后的角度是多少,而转了多少,是和m有关。
既然“角度的增量”只与
把
公式21:代入到公式16里面推一下就好,不难。
公式22:公式21的右边是一个常数,可以写为一个常数
我们要解出
- 当
时: - 当
时: - 当
时: - 推广到m:
对应到公式22:
公式23到公式25的推导没有什么太难的,就是公式25中的把
根据之前的推导,位置编码的相位函数(角度)是:
如果m=0,也就是第一个token,会在原有角度上旋转一个角度
但是相邻 token 的角度差异还是
我们以论文中q和k的内积为例,在公式16中。
如果保留
这两个部分对于公式16中的m和n,相减会直接把
3.2.1小节解读
公式4没什么好说的。需要注意的就是复数做内积,后面那个复数需要取共轭。
公式5:
明白了这个,我们来解释下公式5。首先我们要明白,公式5表达的是对输入
因为输入的是
中间是参数矩阵,一般来说维度是 $dd
最左边是旋转矩阵。根据3.4小节的推导,从最后的公式25可以看出,加位置编码就是乘以
设
乘以
展开:
新实部 (Real):
新虚部 (Imag):
写回矩阵形式 把上面的计算过程写成矩阵形式:
3.4.3小节
这一节主要是说明证明论文提出的位置编码满足两个特性:有上界、长距离衰减(两个位置越远的token,注意力分数越低。但不是单调下降,而是震荡下降)
有界我们很容易想到,就是函数值<=某个值就好。所以公式29使用缩放很好理解,并且缩放的公式也很简单。
因为要说明长距离衰减,那就是m-n越大,值越小,而公式29中和m-n相关的项只为
把无关变量给移出去,也就是
以上就是3.4.3小节的要表达的核心思想以及相关公式解读。接下来,从头来一遍。
公式27:没什么好说的,根据前面的公式推论,公式8和公式25结合下就得到了,然后取实部,就是注意力相似度。这个地方做了一个分组,就是两两配对。
公式28:这一步是为公式29做铺垫,为了把m-n这个变量单独剥离出来分析。理论上来说,如果直接把公式28的极坐标写为复数形式再去实部,那么实部内容如下:
咋一看实部多了一个
其实不然,因为这个操作是求和操作,而不是单项操作。
如果有
作者想证明的:随着距离
阿贝尔变化的作用在于把“互相抵消”这件事(隐藏在
把“内容幅度”这件事(
是做了最坏的一个假设,假设你的词向量内容
至于图2中出现的衰减,因为本质是复数旋转(波的干涉),只要是波,就会有波峰波谷。在某些特定的距离下(波长整数倍),Attention 分数可能会突然回升一点点,这是正常的数学现象。其实核心是
我们需要明白的是:
Decay 的来源:RoPE 的长距离衰减不是像 ALiBi 那样加一个硬性的 Bias 惩罚,而是通过多频率正弦波的干涉自然形成的。
工程与理论的差距:理论证明它是“震荡衰减”的,这就解释了为什么有时候 RoPE 在超长距离下还是会有一些奇怪的“回光返照”(Attention 突然变大),因为那是波的特性。
震荡衰减、知道
实验
一、 总体框架 (The Big Picture)
核心目标:证明 RoPE 不仅仅是数学推导漂亮,而且在实际工程中具有 收敛速度快、效果更好、兼容线性 Attention 以及 处理长文本能力强 等优势。
4 个验证维度:
- 标准任务验证:机器翻译(Transformer 的“老本行”)。
- 预训练模型验证 (BERT):考察在预训练(Pre-training)和下游任务微调(Fine-tuning)中的表现。
- 线性 Attention 兼容性验证 (Performer):证明 RoPE 可以无缝接入线性复杂度模型(这是很多相对位置编码做不到的)。
- 长文本与大规模模型验证:中文长文本任务 + GPT-3 架构上的扩展性对比(与 EleutherAI 合作)。
二、 详细实验解读
- 机器翻译 (Machine Translation)
这是 Transformer 架构最经典的测试床。
- 设定:使用 WMT 2014 英德翻译数据集 1。对比模型包括标准的 Transformer (Baseline) 和使用相对位置编码 (RPE) 的模型。
- 结果:RoFormer 的 BLEU 分数为 27.5,不仅超过了基线 Transformer (26.5),也超过了其他的 RPE 模型 (26.8)
- 结论:RoPE 在最基础的序列到序列任务上是有效的,且优于现有的位置编码方案。
- BERT 预训练与微调 (Pre-training Language Modeling)
这一部分验证 RoPE 在“理解型”预训练模型中的表现。
- 预训练 (Pre-training):
- 设定:用 RoPE 替换 BERT 中的绝对位置编码,在 BookCorpus 和 Wikipedia 上进行预训练 4444。
- 结果:从 Loss 曲线(Fig 3 左图)可以看出,RoFormer 的 收敛速度比 BERT 更快。
- 微调 (Fine-tuning):
- 设定:在 GLUE 基准数据集(MRPC, SST-2, QNLI 等)上进行评估。
- 结果:在 6 个数据集的对比中,RoFormer 在 3 个数据集上显著优于 BERT,特别是在 MRPC (+1.1%) 和 STS-B (+1.9%) 上提升明显 7777。
- 线性 Attention 的兼容性 (Performer with RoPE)
这是一个非常有技术含量的实验。因为大多数相对位置编码(如 T5 的 RPE)是加在 Attention 矩阵上的,这会破坏 Linear Attention 的分解结构,导致无法使用。而 RoPE 是乘在上的,理论上可以兼容。
- 设定:使用 Performer 模型(一种线性复杂度的 Transformer),在 Enwik8 数据集上训练。
- 结果:加入 RoPE 后,Performer 的训练 Loss 下降得更快,收敛更好(Fig 3 右图)。
- 结论:RoPE 是目前为数不多能直接用于 Linear Attention 的相对位置编码方案,这证明了其数学形式的优越性 10。
- 长文本与大规模模型 (Long Text & GPT-3)
这一部分验证 RoPE 的两个重要特性:长距离建模能力 和 在大参数模型上的稳定性。
- 中文长文本 (Chinese Data):
- 任务:CAIL2019-SCM(法律文书相似度匹配),文档长度通常超过 512。
- 结果:RoFormer 随着序列长度增加(从 512 到 1536),准确率稳步提升 12121212。这验证了 RoPE 在处理长文本时的泛化能力。
- GPT-3 架构对比 (with EleutherAI):
- 设定:对比了三种编码方式:GPT-3 原版绝对位置编码 (Learned)、T5 的相对位置编码 (RPE) 和 RoPE 13。测试了小模型 (125M) 和大模型 (1.4B) 。
- 结果:
- 收敛极快:RoPE 在小模型上仅用 <55% 的步数就达到了其他模型原本的性能 15。
- 效果更优:在 Validation Loss 和 PPL(困惑度)指标上,RoPE 均击败了原版 GPT-3 和 T5-RPE 16。三、
验证了数学直觉:你在数学推导中看到的“长距离衰减”性质,在中文长文本实验中得到了验证(模型没有因为距离变长而崩盘,反而利用得很好)。
验证了计算优势:Performer 的实验证明了 RoPE 确实是通过“旋转向量”而非“操作 Attention 矩阵”来实现位置编码的,这种解耦让它能适应各种变体架构。
验证了训练效率:多个实验都提到了 “Faster Convergence”(更快的收敛),这意味着用 RoPE 训练模型更省钱、更高效。



